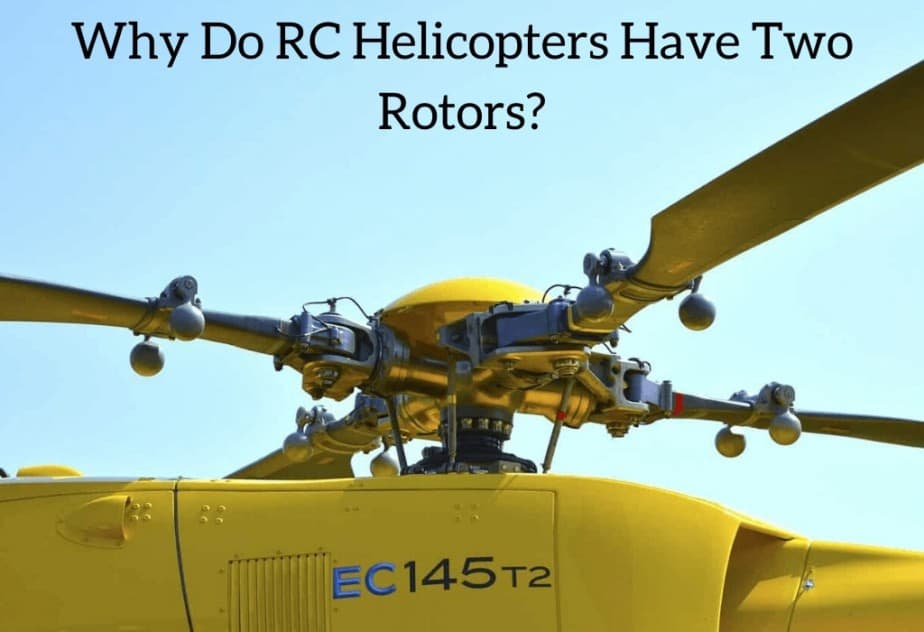

This Is Why RC Helicopters Have 2 Rotors
RC helicopters have what may seem to be a very bizarre design. The two rotor (or coaxial) design featured is not a common feature in modern helicopters. So, if you are expecting your RC helicopter to look exactly like a real helicopter, you may be surprised. Why do RC helicopters have two rotors? The dual …